THE TENONING ROBOT
| Concept | Alessandro Tasora |
| Device designer | Tasora, Massara |
| Lab | Prof.Paolo Righettini, Politecnico di Milano |
| Year | 2002 |
Abstract
This parallel robot exploits a novel scheme which can offer 5-degrees-of-freedom using only linear motors, hence it is very stiff and it can be used for high-speed wood-milling machining (the 'tenoning' process, where the milling shaft must translate and rotate, but without requiring a large displacement in terms of rotation).
The strange kinematic scheme is based on three motors which translate the outer ring of a Cardano mounting, while two other motors can rotate the inner ring by pushing on two rods. In this way we avoided the adoption of typical motor-actuated spherical wrists, in sake of the lowest mass and highest stiffness.
This robot has been studied in terms of theoretical kinematical and dynamical properties, but it hasn't yet been build: here we can show only the animations and pictures obtained with my CHRONO simulation software.
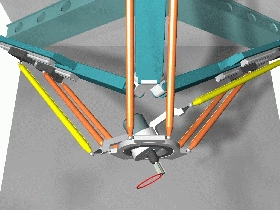
The tenoning PKM robot, in a simulation.

Another picture of the tenoning PKM robot.

Download the AVI simulation (requires DivX codec)
The simulation has been computed with my CHRONO software, and shows some typical trajectories which can be achieved by this robot.