THE 'GRANIT' ROBOT
| Concept | Alessandro Tasora |
| Device designer | Alessandro Tasora |
| RT control software | Paolo Righettini |
| Enterprise | Gamma - PC - Italy |
| Status | Built, tested, currently working each day. |
| Year | 2005-2006 |
Abstract
The GRANIT robot is a 4-degrees-of-freedom manipulator, acting like a SCARA robot but with higher precision and repeatability.
I opted for a design with two motors on the 'shoulders' of a four-bar linkage. This achieves a stiff an precise horizontal motion: repeatability is so high that it hardly can be measured with a micrometer!!!
A complex differential mechanism performs gripper's vertical motion and rotation.
Using my simulation software CHRONO, I obtained a very quick and stiff device, reaching 40m/s2 horizontal accelerations.
The robot is controlled with an industrial PC endorsing a Linux Real Time OS, with CAN-open buses.
Further secret details cannot be discussed, for a non-disclosure agreement.
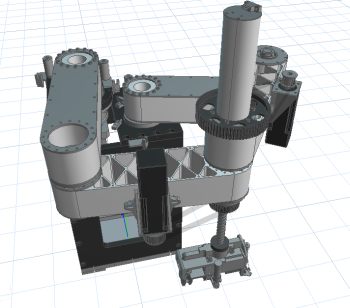
The robot has been designed with a 3D parametric CAD. Also, thank to my simulation software CHRONO, I simulated and optimized motors, reactions, etc.
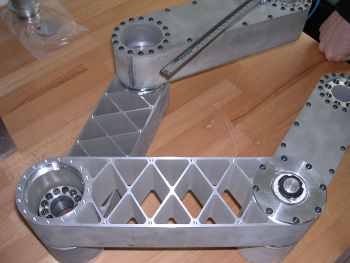
Biceps of the GRANIT robot, during build/assembly phase. Note that the honeycomb biceps are made of ERGAL alloy, and have been cut with EDM machining, for superior precision, high stiffness and low weight.
Ball bearings are special thin-section extra-precision cross cylinder bearings.

The final GRANIT robot, just before its first benchmark. Note the large cable collectors.

Download the 600kB AVI animation (requires DivX codec)
The animation above has been computed with my CHRONO software.

Download the article, presented at the RAAD2005 conference