THE 'TORX' ROBOT
| Concept | Alessandro Tasora |
| Device designer | Alessandro Tasora, Flavio Colnago |
| RT control software | Flavio Colnago |
| Lab | Prof.Paolo Righettini, Politecnico di Milano |
| Year | 2000 |
Abstract
 The TORX robot is a 3-degrees-of-freedom manipulator based
on the 'parallel kinematic machine' approach (PKM).
The TORX robot is a 3-degrees-of-freedom manipulator based
on the 'parallel kinematic machine' approach (PKM).
In sake of a good cost/performance ratio, we used three pneumatic actuators controlled by proportional valves.
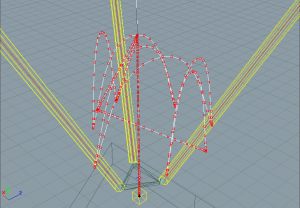
The motion of the end effector is obtained by pushing three linear guides with the three pneumatic cylinders. Each roller is connected to the end effector by a shaft with two Cardano joints at its ends. Given the configuration of the three shafts, it can be demonstrated that the end effector flange cannot rotate in space (it is constrained to translation only).
Despite the cheap design and the cost constraints, we made our best to improve stiffness. The final prototype is able to carry large payloads (up to 30 kg) on arbitrary trajectores, with positioning errors of few millimeters. This is a good result considering that we used pneumatic actuators instead of the more expensive electric motors.
The control of this robot is performed by a dedicated PC which acquires the positioning error thank to three linear magnetic encoders, and feeding the correction to the three proportional valves.
This robot has been studied and designed using my simulation software CHRONO.
The robot is controlled with an industrial PC endorsing a Linux Real Time OS. A first version of the control system performed a digital feedback of motors on the PC, by acquiring resolver rotations in real-time and feeding three analog speed setpoints to motor drives. A later version uses a realtime setpoint control via CAN-open buses.

The 3D model of the TORX robot.
A typical trajectory with pick&place arcs, for benchmarking the TORX robot.
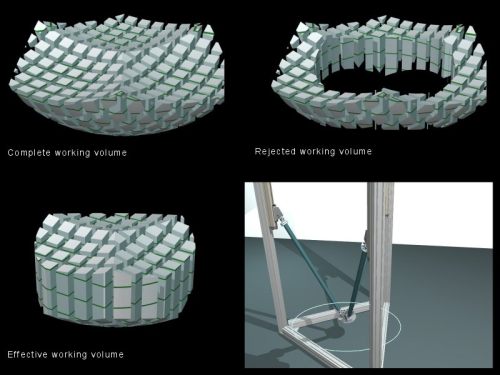
The working volume of the TORX robot.

Download the AVI simulation (requires DivX codec)
This TORX simulation has been computed with my CHRONO software.

Download the article, presented at the RAAD2001 conference